Содержание
Плоскости малого таза — Женский таз — Акушерство — Мед312.ру
15.06.2010
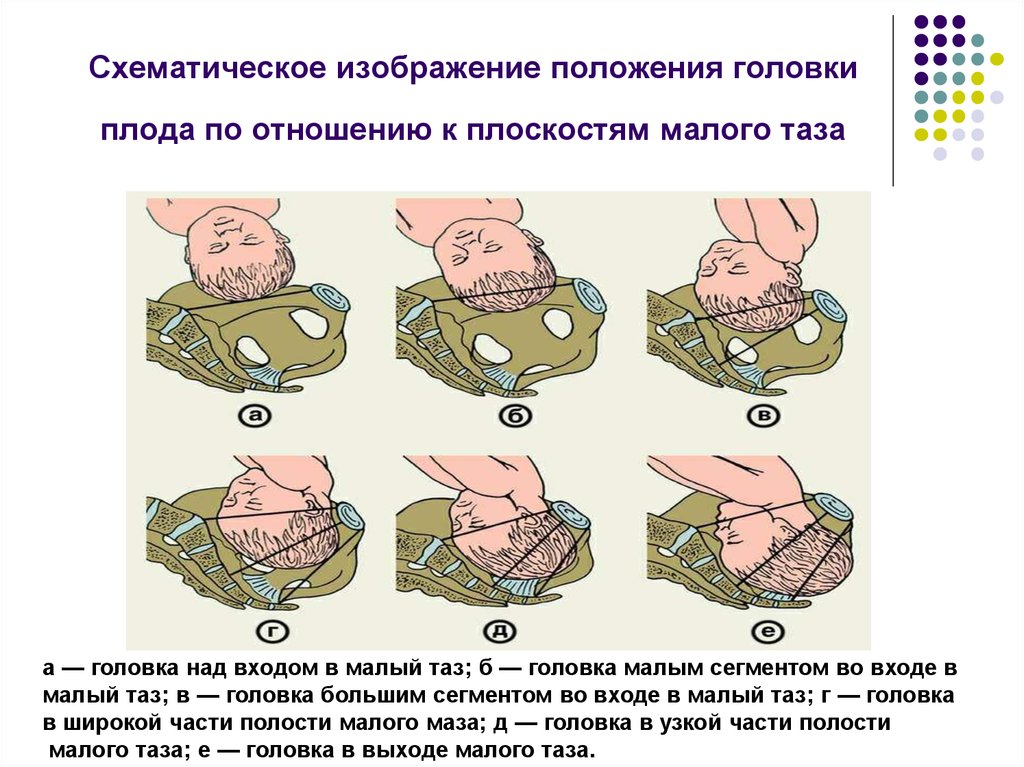
Различают четыре плоскости малого таза
I. Плоскость входа в таз имеет следующие границы: спереди — верхний край симфиза и верхневнутренний край лобковых костей, с боков — дугообразные линии подвздошных костей, сзади — крестцовый мыс. Плоскость входа имеет форму почки или поперечно-расположенного овала с выемкой, соответствующей крестцовому мысу.
Во входе в таз различают три размера: прямой, поперечный и два косых.
Прямой размер — расстояние от крестцового мыса до наиболее выдающегося пункта на внутренней поверхности лобкового симфиза. Это акушерская, или истинная, конъюгата (conjugata vera), она равна 11 см. Выделяют еще анатомическую конъюгату — расстояние от мыса до середины верхнего внутреннего края симфиза. Анатомическая конъюгата. немного (на 0,3 — 0,5 см) больше акушерской конъюгаты.
Поперечный размер — расстояние между наиболее отдаленными точками дугообразных линий, он равен 13 — 13,5 см.
Правый косой размер — расстояние от правого крестцово-подвздошного соединения до левого подвздошно-лобкового возвышения, левый косой размер — от левого крестцово-подвздошного соединения до правого подвздошно-лобкового возвышения.
Для того чтобы легче было ориентироваться в направлении косых размеров таза у роженицы, М. С. Малиновский и М. Г. Кушнир предложили следующий прием: кисти обеих рук складывают под прямым углом, причем ладони обращены кверху, концы пальцев приближают к выходу таза лежащей женщины.
Плоскость левой руки будет совпадать с левым косым размером таза, плоскость правой — с правым.
II. Плоскость широкой части полости таза имеет следующие границы: спереди — середина внутренней поверхности симфиза, по бокам — середина вертлужных впадин, сзади — место соединения II и III крестцовых позвонков.
В широкой части полости таза различают два размера:
 Прямой размер — от соединения II и III крестцовых позвонков до середины внутренней поверхности симфиза, он равен 12,5 см. Поперечный размер — между серединами вертлужных впадин, он равен 12,5 см. Косых размеров в широкой части полости таза нет, так как в этом месте таз не образует сплошного костного кольца. Косые размеры в широкой части таза допускаются условно (длина 13 см).
Прямой размер — от соединения II и III крестцовых позвонков до середины внутренней поверхности симфиза, он равен 12,5 см. Поперечный размер — между серединами вертлужных впадин, он равен 12,5 см. Косых размеров в широкой части полости таза нет, так как в этом месте таз не образует сплошного костного кольца. Косые размеры в широкой части таза допускаются условно (длина 13 см).III. Плоскость узкой части плоскости таза ограничена спереди нижним краем симфиза, с боков — остями седалищных костей, сзади — крестцово-копчиковым соединением.
Прямой размер — от крестцово-копчикового соединения до нижнего края симфиза (вершина лобковой дуги), он равен 11 — 11,5 см. Поперечный размер определяют между остями седалищных костей, он равен 10,5 см.
IV. Плоскость выхода таза имеет следующие границы: спереди — нижний край симфиза, с боков — седалищные бугры, сзади — верхушка копчика. Плоскость выхода таза состоит из двух треугольных плоскостей, общим основанием которых является линия, соединяющая седалищные бугры.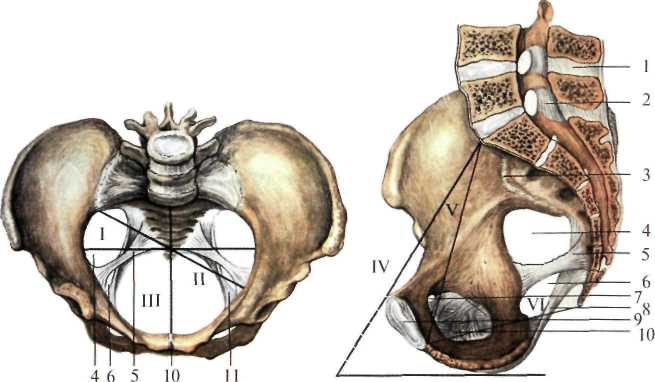 В выходе таза различают два размера: прямой и поперечный.
В выходе таза различают два размера: прямой и поперечный.
Прямой размер выхода таза — от верхушки копчика до нижнего края симфиза, он равен 9,5 см. При прохождении плода через малый таз копчик отходит на 1,5 — 2 см и прямой размер увеличивается до 11,5 см. Поперечный размер выхода таза определяют между внутренними поверхностями седалищных бугров, он равен 11 см. Таким образом, во входе в малый таз наибольшим размером является поперечный. В широкой части полости таза прямой и поперечный размеры равны, наибольшим будет условно принятый косой размер. В узкой части полости и выхода таза прямые размеры больше поперечных.
«Акушерство», В.И.Бодяжина
- Тазовое дно
- Мышцы и фасции тазового дна
- Женский таз в акушерском отношении
- Параллельные плоскости таза
- Наклонение таза
- Кости таза
- Седалищная и лобковая кость, крестец
- Основание крестца и копчик
измерение женского таза — читайте в блоге jeepDONbass на spaces – Spcs.
 global
globalИзмерение размеров таза. Для оценки емкости таза измеряют 3 наружных размера таза и расстояние между бедренными костями. Измерение таза называется пельвиметрия и проводится при помощи тазомера.
Наружные размеры таза:
1. Distancia spinarum — межостистая дистанция — расстояние между передневерхними остями подвздошных костей (ость — spina), в нормальном тазу равняется 25-26 см.
2. Distancia cristarum — межгребневая дистанция — расстояние между наиболее отдаленными точками гребней подвздошных костей (гребень — crista), в норме равняется 28-29 см.
3. Distancia trochanterica — межбугристая дистанция — расстояние между большими буграми вертелов бедренных костей (большой бугор — trochanter major), в норме равняется 31 см.
4. Conjugata externa — наружная конъюгата — расстояние между серединой верхнего края симфиза и надкрестцовой ямкой (углублением между остистым отростком V поясничного и I крестцового позвонков). В норме равняется 20—21 см.
При измерении первых трех параметров женщина лежит в горизонтальном положении на спине с вытянутыми ногами, пуговки тазомера устанавливают на края размера. При измерении прямого размера широкой части полости малого таза Для лучшего выявления больших вертелов женщину просят свести носки ступней. При измерении наружной конъюгаты предлагают женщине повернуться спиной к акушерке и со-«гуть нижнюю ногу.
Плоскости малого таза. В полости малого таза выделяют Условно четыре классические плоскости.
1-я плоскость называется плоскостью входа. Она ограничена спереди верхним краем симфиза, сзади — мысом, с боков — безымянной линией. Прямой размер входа (между серединой верхневнутреннего края симфиза и мысом) совпадает с истинной конъюгатой {conjugata vera). В нормальном тазу истинная конъюгата равна 11 см. Поперечный размер первой плоскости — расстояния между наиболее отдаленными точками пограничных линий — равен 13 см. Два косых размера, каждый из которых равен 12 или 12,5 см, идут от крестцово-подвздошного сочленения до противоположного подвздошно-лонного бугра.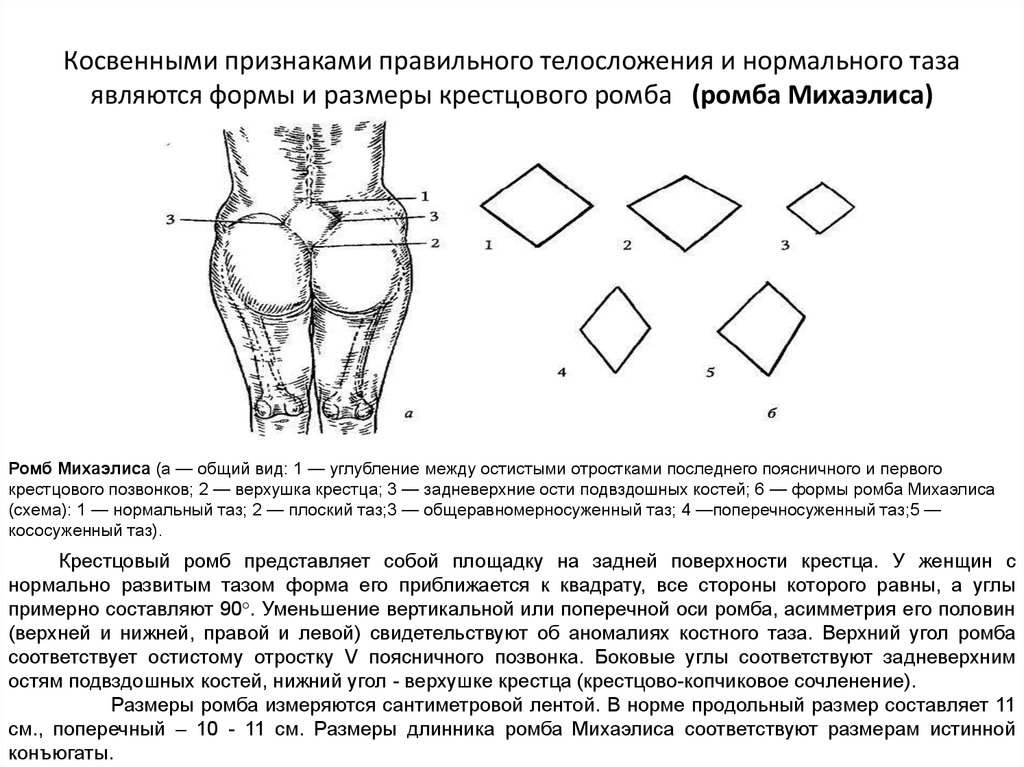
Плоскость входа в малый таз имеет поперечно-овальную форму.
2-я плоскость малого таза называется плоскостью широкой части. Она проходит через середину внутренней поверхности лона, крестца и проекции вертлужной впадины. Эта плоскость имеет округлую форму. Прямой размер, равный 12,5 см, идет от середины внутренней поверхности лонного сочленения до сочленения II и III крестцовых позвонков. Поперечный размер соединяет середины пластинок вертлужных впадин и также равен 12,5 см.
3-я плоскость называется плоскостью узкой части малого таза. Она ограничена спереди нижним краем симфиза,сзади крестцово-копчиковым сочлененим и с боков седалищными остями. Прямой размер этой плоскости между нижним краем симфиза и крестцово-копчиковым сочленением равен 11 см. Поперечный размер — между внутренними поверхностями седалищных остей — равен 10 см. Эта плоскость имеет форму продольного овала.
4-я плоскость называется плоскостью выхода и состоит из двух плоскостей, сходящихся под углом.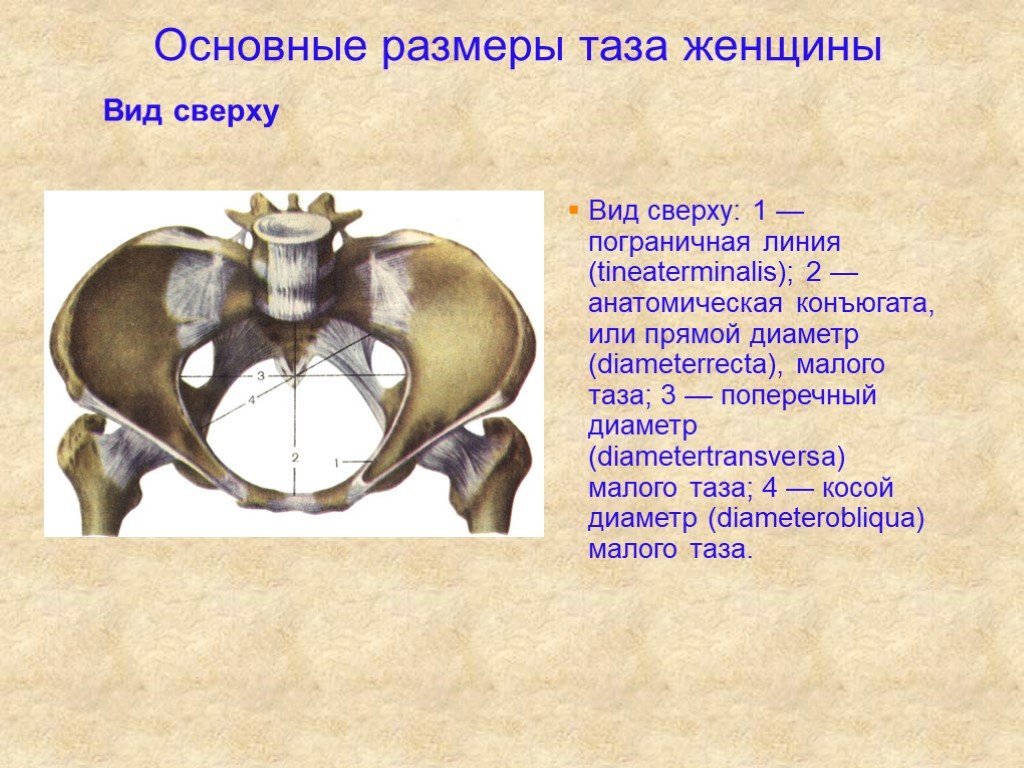 Спереди она ограничена нижним краем симфиза (как и 3-я плоскость), с боков седалищными буграми, а сзади — краем копчика. Прямой размер плоскости выхода идет от нижнего края симфиза до кончика копчика и равен 9,5 см, а в случае отхождения копчика увеличивается на 2 см. Поперечный размер выхода ограничен внутренними поверхностями седалищных бугров и равен 10,5 см. При отхождении копчика эта плоскость имеет форму продольного овала.
Спереди она ограничена нижним краем симфиза (как и 3-я плоскость), с боков седалищными буграми, а сзади — краем копчика. Прямой размер плоскости выхода идет от нижнего края симфиза до кончика копчика и равен 9,5 см, а в случае отхождения копчика увеличивается на 2 см. Поперечный размер выхода ограничен внутренними поверхностями седалищных бугров и равен 10,5 см. При отхождении копчика эта плоскость имеет форму продольного овала.
Проводная линия, или ось таза, проходит через пересечение прямых и поперечных размеров всех плоскостей.
Внутренние размеры таза можно измерить при ультразвуковой пельвиметрии, которая еще недостаточно широко применяется.
При влагалищном исследовании можно оценить правильность развития таза. Если мыс при исследовании не достигается — это признак емкого таза. Если мыс достигается, измеряют диагональную конъюгату (расстояние между нижненаружным краем симфиза и мысом), которая в норме должна быть не меньше 12,5—13 см .
О внутренних размерах таза и степени сужения судят по истинной конъюгате (прямой размер плоскости входа), которая в нормальном тазу — не менее 11 см.
Вычисляют истинную конъюгату по двум формулам:
• Истинная конъюгата равна наружной конъюгате минус 9-10 см.
• Истинная конъюгата равна диагональной конъюгате минус 1,5—2 см.
При толстых костях вычитают максимальную цифру, при тонких — минимальную. Для оценки толщины костей предложен индекс Соловьева (окружность запястья). Если индекс менее 14—15 см — кости считаются тонкими, если более 15 см — толстыми.
О размерах и форме таза можно судить также по форме и размерам ромба Михаэлиса, который соответствует проекции крестца. Верхний его угол соответствует надкрестцовой ямке, боковые — задневерхним остям подвздошных костей, нижний — верхушке крестца.
Размеры плоскости выхода, как и наружные размеры таза, также можно измерить при помощи тазомера.
Угол наклона таза — это угол между плоскостью его входа и горизонтальной плоскостью. При вертикальном положении женщины он равен 45-55 градусам. Он уменьшается, если женщина сидит на корточках или лежит в гинекологической позе с согнутыми и приведенными к животу ногами (возможное положение в родах).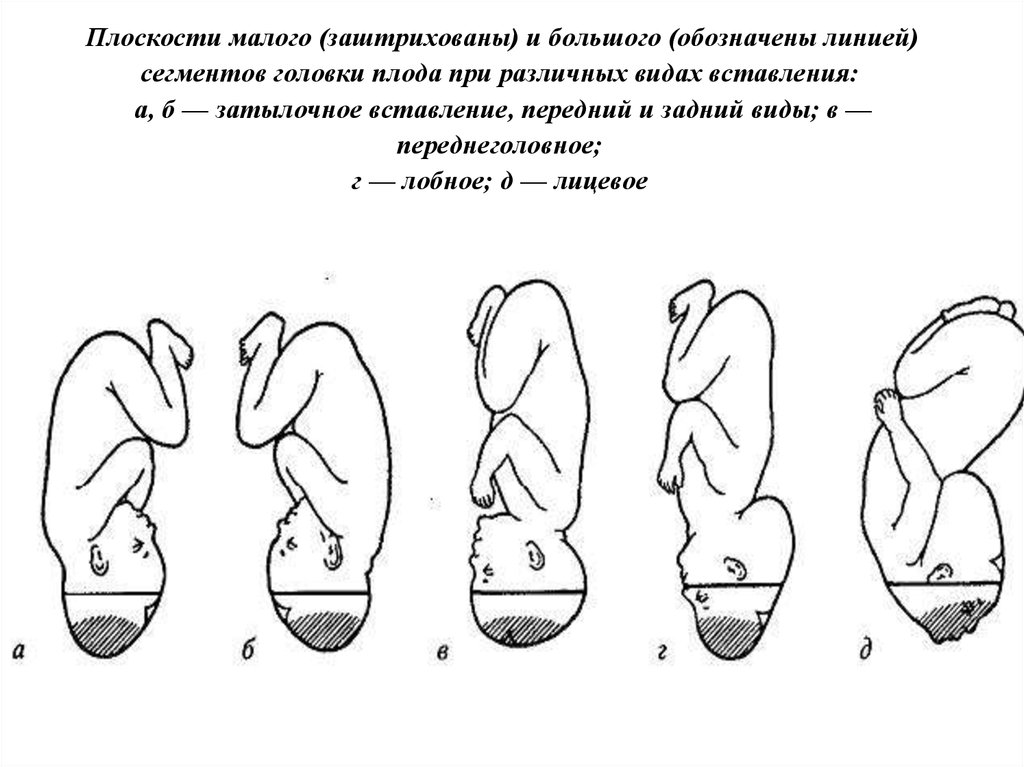 Эти же положения позволяют увеличить прямой размер плоскости выхода. Угол наклона таза увеличивается, если женщина лежит на спине, подложив под спину валик, или если при вертикальном положении она прогибается назад. Это же происходит, если женщина лежит на гинекологическом кресле со спущенными вниз ногами (положение Вальхера). Эти же положения позволяют увеличить прямой размер входа.
Эти же положения позволяют увеличить прямой размер плоскости выхода. Угол наклона таза увеличивается, если женщина лежит на спине, подложив под спину валик, или если при вертикальном положении она прогибается назад. Это же происходит, если женщина лежит на гинекологическом кресле со спущенными вниз ногами (положение Вальхера). Эти же положения позволяют увеличить прямой размер входа.
Достоверность измерения трехмерной ориентации передней плоскости таза путем регистрации с помощью инерциального измерительного блока -стадия остеоартроза (ОА) тазобедренного сустава (1). ТЭЛА также является основным методом лечения переломов шейки бедренной кости и остеонекроза головки бедренной кости (1). Передняя тазовая плоскость (APP), образованная билатеральными передними верхними подвздошными остями и верхним краем лобкового симфиза, рассматривалась как анатомический ориентир для навигационной системы во время THA (2, 3). Наклон таза (PT) определялся как угол APP относительно вертикальной оси, и во многих сообщениях отмечалась определенная взаимосвязь между PT и антеверсией вертлужной впадины и деформацией поясничного отдела позвоночника (4, 5).

Сообщалось о нескольких полезных методах рентгенологической визуализации для получения ориентации APP (6–12). Рентгенологическая визуализация была ограничена определенной позой и обеспечивала только фронтальную и сагиттальную проекции (6–10). Компьютерная томография и ультразвуковое устройство могут обеспечить трехмерную (3D) реконструкцию костной модели таза для анализа нормального направления плоскости APP, но эти методы легко приводили к ошибкам ориентации APP из-за толщины мягких тканей (6–10). ). Система визуализации EOS может обеспечить высококачественное изображение и надежна для оценки ориентации APP при более низком уровне излучения (11, 12). Однако он может обеспечить только статическую позу, и его также трудно удерживать в правильном положении при проведении измерений. Таким образом, трехмерная система измерения движения таза будет полезна в клинических областях, поскольку она может устранить некоторые недостатки предыдущих технологий.
В последнее время инерциальные измерительные устройства (IMU) широко используются в клинических и реабилитационных учреждениях.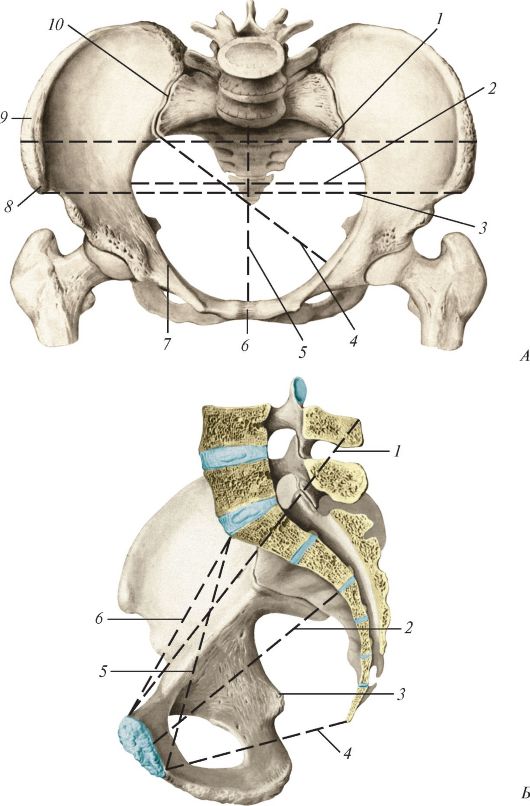 IMU представляет собой небольшое электрическое устройство, которое измеряет скорость и ускорение, угловую скорость и ускорение, а также ориентацию тела с помощью акселерометров, гироскопов и/или магнитометров (13–17). Функциональное движение поясничного отдела позвоночника измеряли с помощью ИМУ для оценки нарушений, связанных с движением (13). Носимое устройство на основе IMU использовалось для измерения формы и осанки позвоночника (14–16), а также для анализа спортивных движений (17). Кроме того, ПВ анализировался с использованием одного датчика IMU (18, 19). Однако получить функциональное перемещение информации об ориентации трехмерного динамического приложения очень сложно. Это исследование предоставило метод измерения ориентации 3D APP путем регистрации с помощью IMU, и его надежность была проверена.
IMU представляет собой небольшое электрическое устройство, которое измеряет скорость и ускорение, угловую скорость и ускорение, а также ориентацию тела с помощью акселерометров, гироскопов и/или магнитометров (13–17). Функциональное движение поясничного отдела позвоночника измеряли с помощью ИМУ для оценки нарушений, связанных с движением (13). Носимое устройство на основе IMU использовалось для измерения формы и осанки позвоночника (14–16), а также для анализа спортивных движений (17). Кроме того, ПВ анализировался с использованием одного датчика IMU (18, 19). Однако получить функциональное перемещение информации об ориентации трехмерного динамического приложения очень сложно. Это исследование предоставило метод измерения ориентации 3D APP путем регистрации с помощью IMU, и его надежность была проверена.
Материалы и методы
Трехмерная ориентация АРР может быть представлена двумя линейно независимыми векторами: вектором нормали к АРР и вектором, включенным в АРР (20). Следующая процедура направлена на поиск двух векторов для представления APP из информации о местоположении датчика IMU.
Следующая процедура направлена на поиск двух векторов для представления APP из информации о местоположении датчика IMU.
Локальная система координат для датчика IMU может быть определена четырьмя точками (конечными точками горизонтальной и вертикальной полос, прикрепленных к датчику IMU), а локальная система координат для APP может быть определена тремя точками (двумя передними верхними точками). точки подвздошной ости и краевую точку на лобковых бугорках). Два изображения тазовой части из фронтальной и левой сагиттальной проекций в нейтральной позе стоя использовались для регистрации локальных систем координат APP и датчика IMU (рис. 1A). Два изображения были получены путем виртуального проецирования трехмерной модели костей таза с помощью датчика IMU с фронтальной и левой сагиттальной проекций, где трехмерная модель таза была разработана в нашем предыдущем исследовании (21). Эти изображения включали четыре точки (P1, P2, P3 и P4) от датчика IMU и три точки (P5, P6 и P7) от приложения.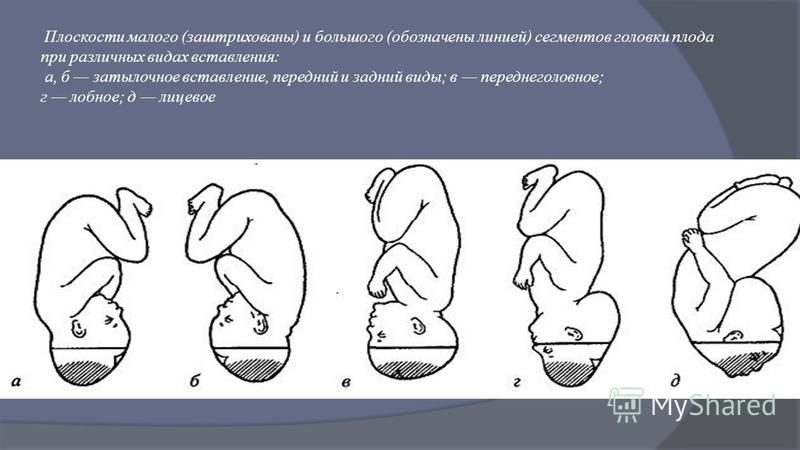
Рисунок 1 . Фронтальные и левые сагиттальные изображения модели таза, включая датчик IMU и APP. ( A ) Нейтральное положение стоя. ( B ) Сгибание под углом 30°.
На фронтальных и левых сагиттальных рисунках в качестве начала отсчетов OF и OS были установлены верхние левые угловые точки. Затем горизонтальные и вертикальные расстояния в пикселях от OF до Pi(1≤i≤7) определялись с помощью NFi,1 и NFi,2. Точно так же горизонтальное и вертикальное расстояния в пикселях от OS до Pi(1≤i≤7) были NSi,1 и NSi,2.
Определим v1=P2P1→ и v2=P3P4→ для локальной системы координат датчика IMU и v3=P5P7→ и v4=P5P6→ для локальной системы координат АРР.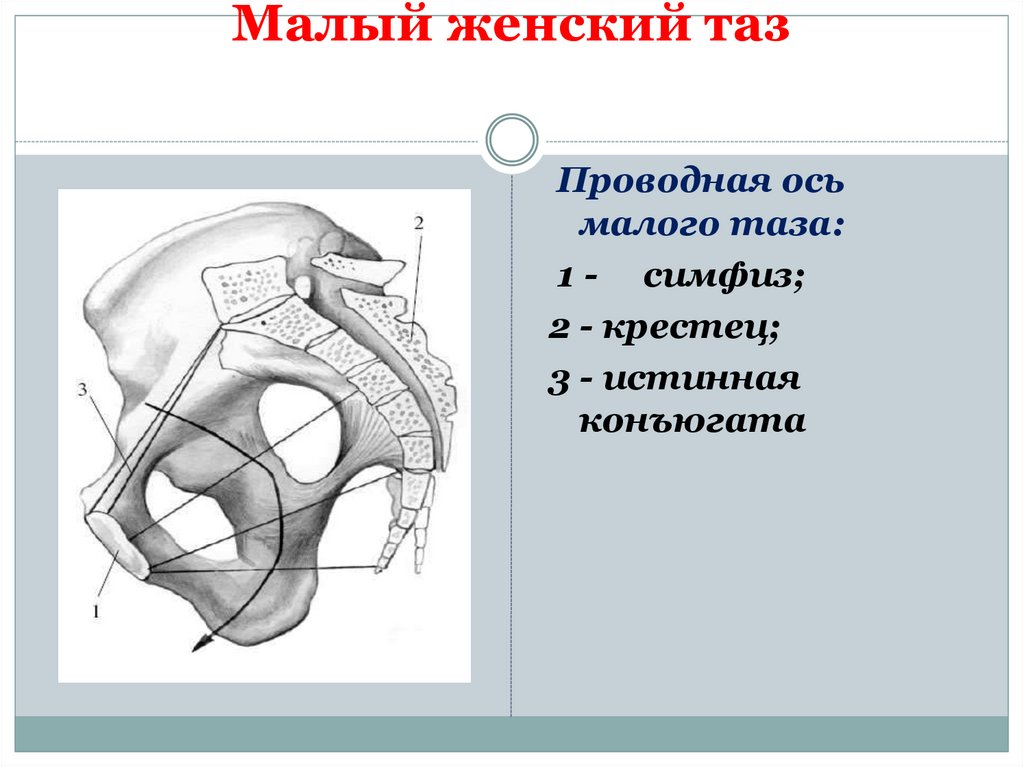
PiPj→=[NFi,1−NFj,1UF,NSi,1−NSj,1US,12(NFi,2−NFj,2UF+NSi,2−NSj,2US)]
, где x -компонент и y -компоненты нормализованы UF и US соответственно, а z -компонента является средним значением z -компонентов, нормированных UF и US. Тогда v1=P2P1→, v2=P3P4→, v3=P5P7→ и v4=P5P6→ представлены как
v1=P2P1→=[NF2,1−NF1,1UF,NS2,1−NS1,1US,12 (NF2,2-NF1,2UF+NS2,2-NS1,2US)]
v2=P3P4→=[NF3,1-NF4,1UF,NS3,1-NS4,1US,12(NF3,2-NF4, 2UF+NS3,2−NS4,2US)]
v3=P5P7→=[NF5,1−NF7,1UF,NS5,1−NS7,1US,12(NF5,2−NF7,2UF+NS5,2−NS7,2US)]
v4=P5P6→= [NF5,1−NF6,1UF,NS5,1−NS6,1US,12(NF5,2−NF6,2UF+NS5,2−NS6,2US)]
Три единичных вектора, u1=v1/||v1| |, u2=v2/||v2|| и u3=u1×u2 построить ортонормированный базис для локальной системы координат датчика IMU. Пусть матрица 3×3 U0 равна U0=[u1⋮u2⋮u3]. Более того, еще три единичных вектора, u4=v3/||v3||, u5=v4/||v4|| и u6=u4×u5, представляют ориентацию APP, где u6 — вектор нормали к APP, и u4 — вектор, включенный в АРР слева направо от анатомических точек. Два вектора, u6 и u4, используются в качестве эталонных единичных векторов для оценки ориентации АРР в других позах.
Пусть матрица 3×3 U0 равна U0=[u1⋮u2⋮u3]. Более того, еще три единичных вектора, u4=v3/||v3||, u5=v4/||v4|| и u6=u4×u5, представляют ориентацию APP, где u6 — вектор нормали к APP, и u4 — вектор, включенный в АРР слева направо от анатомических точек. Два вектора, u6 и u4, используются в качестве эталонных единичных векторов для оценки ориентации АРР в других позах.
Для геометрического понимания u6 и u4 вводятся понятия широты и долготы. Широта θLat вектора определяется как угол между вектором и плоскостью xy , где направление + z равно +90°, а направление – z равно –90°. Долгота θLong вектора определяется как угол между вектором и плоскостью
Рисунок 2 . Определение широты и долготы вектора.
В произвольной позе вектор нормали к АРР и вектор от анатомических точек слева направо можно оценить, если даны фронтальные и левые сагиттальные фигуры, включая только четыре конечные точки на полосах, прикрепленных к датчику IMU. Пусть эти четыре точки будут P¯1, P¯2, P¯3 и P¯4. Как и в нейтральной позе стоя, можно получить три единичных вектора u¯1, u¯2 и u¯3 и построить ортонормированный базис для локальной системы координат датчика IMU в произвольной позе. Пусть матрица 3×3 U будет U=[u¯1⋮u¯2⋮u¯3]. В предположении, что датчик ИИМ и АПП были прикреплены к тазу, вектор нормали к АПП u¯6 и вектор слева направо анатомической точки u¯4 в произвольной позе можно оценить как u¯6=UU0 −1u6 и u¯4=UU0−1u4 (рис. 1B). Пусть αLat и αLong — широта и долгота u¯6, а βLat и βLong — широта и долгота u¯4.
Пусть эти четыре точки будут P¯1, P¯2, P¯3 и P¯4. Как и в нейтральной позе стоя, можно получить три единичных вектора u¯1, u¯2 и u¯3 и построить ортонормированный базис для локальной системы координат датчика IMU в произвольной позе. Пусть матрица 3×3 U будет U=[u¯1⋮u¯2⋮u¯3]. В предположении, что датчик ИИМ и АПП были прикреплены к тазу, вектор нормали к АПП u¯6 и вектор слева направо анатомической точки u¯4 в произвольной позе можно оценить как u¯6=UU0 −1u6 и u¯4=UU0−1u4 (рис. 1B). Пусть αLat и αLong — широта и долгота u¯6, а βLat и βLong — широта и долгота u¯4.
Два вектора, u¯6 и u¯4, также можно получить, используя P¯5, P¯6 и P¯7, которые являются тремя анатомическими точками в произвольной позе. Два метода расчета должны давать одни и те же векторы на основе фундаментальной линейной алгебры. Однако при получении значений Pi и P¯i(1≤i≤7) могут возникать ошибки измерения, поскольку пиксельные значения точек измеряются вручную.
Для исследования надежности измерения ориентации 3D APP только с использованием позиционной информации от одного датчика IMU 10 добровольцев (26,1 ± 3,5 года, острота зрения 0,86 ± 0,45) приняли участие в тестовом эксперименте с письменного информированного согласия.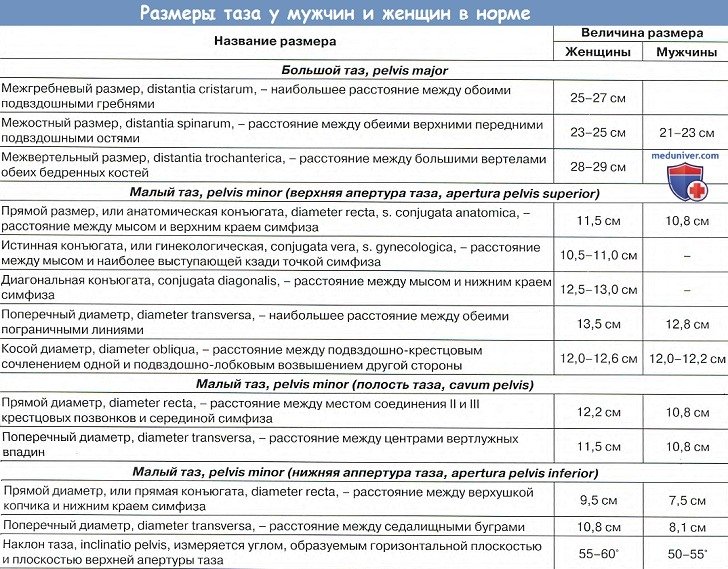 Планшет Android (Samsung Galaxy Tab S3 9.7, Корея) использовался для сбора данных о точках, а сенсорный карандаш использовался для отметки четырех точек в датчиках IMU и трех анатомических точек (рис. 3). Каждый участник щелкнул по семи точкам на фронтальных и левых сагиттальных изображениях из одиннадцати разных наборов изображений и повторил эксперимент пять раз со случайно переупорядоченными наборами изображений.
Планшет Android (Samsung Galaxy Tab S3 9.7, Корея) использовался для сбора данных о точках, а сенсорный карандаш использовался для отметки четырех точек в датчиках IMU и трех анатомических точек (рис. 3). Каждый участник щелкнул по семи точкам на фронтальных и левых сагиттальных изображениях из одиннадцати разных наборов изображений и повторил эксперимент пять раз со случайно переупорядоченными наборами изображений.
Рисунок 3 . Планшет/карандаш Android, использованный в эксперименте.
11 наборов изображений были получены с использованием трехмерной модели костей таза: (1) нейтральное стоячее положение, (2) сгибание 15°, (3) разгибание 15°, (4) разгибание 30°, (5) правое вращение 15° , (6) правый поворот 30°, (7) левый изгиб 15°, (8) левый изгиб 30°, (9) разгибание 15° и правый поворот 15°, (10) правый поворот 15° и левый изгиб 15°, и (11) разгибание 15° и изгиб вправо 15°. Во-первых, трехмерная костная модель таза (21) с датчиком IMU была настроена на заданное положение среди 11 положений с использованием коммерческого программного обеспечения CAD. Затем были получены изображения путем проецирования 3D-модели с фронтальной и левой сагиттальной проекций. Таким образом, были известны точные значения αLat, αLong, βLat и βLong в данной позе. Затем были проанализированы ошибки измерения αLat, αLong, βLat и βLong путем сравнения значений, полученных из четырех точек, измеренных вручную в датчике IMU, и известных точных значений. Кроме того, также сравнивались ошибки между значениями, полученными из трех измеренных вручную трех анатомических точек, и известными точными значениями. Были проанализированы средние ошибки результатов всех участников из пяти испытаний. Коэффициенты межклассовой корреляции (ICC) среди 10 участников для αLat, αLong, βLat и βLong были исследованы в каждом случае измерения с использованием четырех точек в датчике IMU и с использованием трех анатомических точек.
Затем были получены изображения путем проецирования 3D-модели с фронтальной и левой сагиттальной проекций. Таким образом, были известны точные значения αLat, αLong, βLat и βLong в данной позе. Затем были проанализированы ошибки измерения αLat, αLong, βLat и βLong путем сравнения значений, полученных из четырех точек, измеренных вручную в датчике IMU, и известных точных значений. Кроме того, также сравнивались ошибки между значениями, полученными из трех измеренных вручную трех анатомических точек, и известными точными значениями. Были проанализированы средние ошибки результатов всех участников из пяти испытаний. Коэффициенты межклассовой корреляции (ICC) среди 10 участников для αLat, αLong, βLat и βLong были исследованы в каждом случае измерения с использованием четырех точек в датчике IMU и с использованием трех анатомических точек.
Результаты
В таблице 1 показано среднее значение и стандартное отклонение (SD) ошибок в αLat, αLong, βLat и βLong для 11 наборов изображений для каждого участника, когда ошибка была рассчитана по трем анатомическим точкам.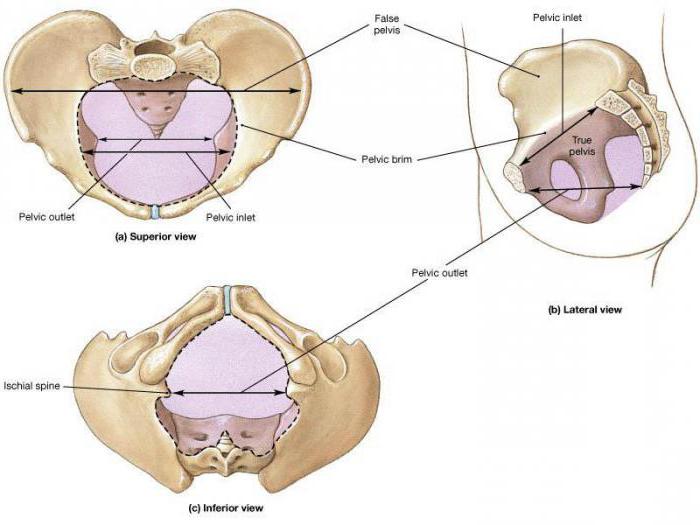 Кроме того, среднее ± SD 10 средних значений было представлено как 0,6° ± 0,2°, 0,5° ± 0,2°, 0,3° ± 0,1° и 0,5° ± 0,2°, в то время как среднее ± SD 10 SD составило 0,3° ± 0,1. °, 0,5° ± 0,2°, 0,2° ± 0,1° и 0,5° ± 0,2° в αшир., αдолг., βшир. и βдолг. Все средние и стандартные отклонения были меньше 1°. ICC среди 10 участников для αLat, αLong, βLat и βLong составили 0,9.954, 0,9058, 0,9967 и 0,9979 соответственно.
Кроме того, среднее ± SD 10 средних значений было представлено как 0,6° ± 0,2°, 0,5° ± 0,2°, 0,3° ± 0,1° и 0,5° ± 0,2°, в то время как среднее ± SD 10 SD составило 0,3° ± 0,1. °, 0,5° ± 0,2°, 0,2° ± 0,1° и 0,5° ± 0,2° в αшир., αдолг., βшир. и βдолг. Все средние и стандартные отклонения были меньше 1°. ICC среди 10 участников для αLat, αLong, βLat и βLong составили 0,9.954, 0,9058, 0,9967 и 0,9979 соответственно.
Таблица 1 . Ошибки из-за ручного измерения трех анатомических точек (единица измерения: °).
В таблице 2 показано среднее значение и стандартное отклонение ошибок в αLat, αLong, βLat и βLong для 11 наборов изображений для каждого участника при использовании четырех точек в датчике IMU. Среднее ± SD 10 средних также было представлено как 3,4° ± 0,3°, 2,0° ± 1,0°, 1,6° ± 0,4° и 2,1° ± 0,8°, в то время как среднее ± SD 10 СО было 0,9° ± 0,4°. , 1,1° ± 0,4°, 0,6° ± 0,2° и 1,1° ± 0,4° в αшир., αдолг., βшир. и βдолг. Максимальное среднее значение и стандартное отклонение ошибок составили 4,0° по αшир.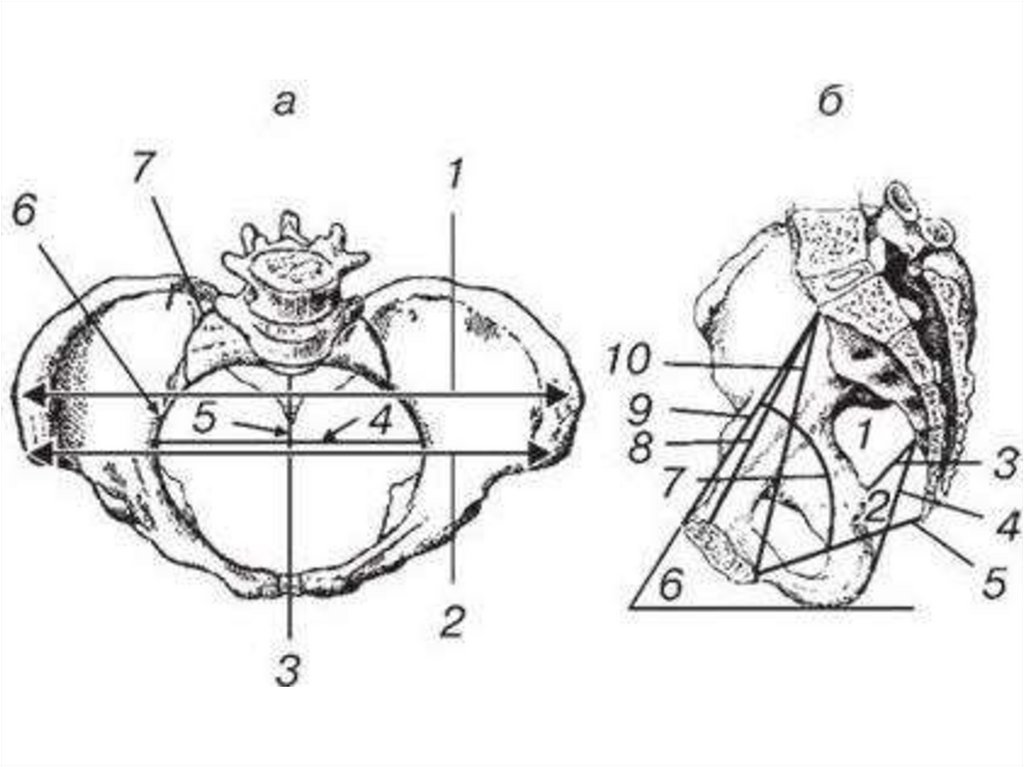 для участника 6 и 2,0° по αдолг. для участника 2. ICC среди 10 участников для αшир., αдолг., βшир. и βдолг. составил 0,9.933, 0,9668, 0,9933 и 0,9671 соответственно.
для участника 6 и 2,0° по αдолг. для участника 2. ICC среди 10 участников для αшир., αдолг., βшир. и βдолг. составил 0,9.933, 0,9668, 0,9933 и 0,9671 соответственно.
Таблица 2 . Ошибки измеренных вручную четырех точек датчика IMU (единица измерения: °).
Обсуждение
При измерении из трех анатомических точек средние ошибки в αшир., αдолг., βшир. и βдлинн. были довольно малы (менее 0,6°). Стандартные отклонения для набора изображений и участника, которые были связаны с изменчивостью в зависимости от набора изображений и участника, также были очень малы (менее 0,3° и 0,5°). При этом ИКК для четырех углов превышали 0,9.. Эти результаты показывают, что измерение направления АРР с использованием трех анатомических точек можно считать точным; таким образом, его можно использовать в качестве истинного значения направления АРР из-за сложности прямого измерения направления АРР в обычных клинических условиях.
При измерении с четырех точек датчика IMU средние ошибки αLat, αLong, βLat и βLong были приемлемыми (1,6°–3,4°) по сравнению с ошибками или вариациями (2°–10°), представленными в предыдущих исследованиях (2, 19, 22).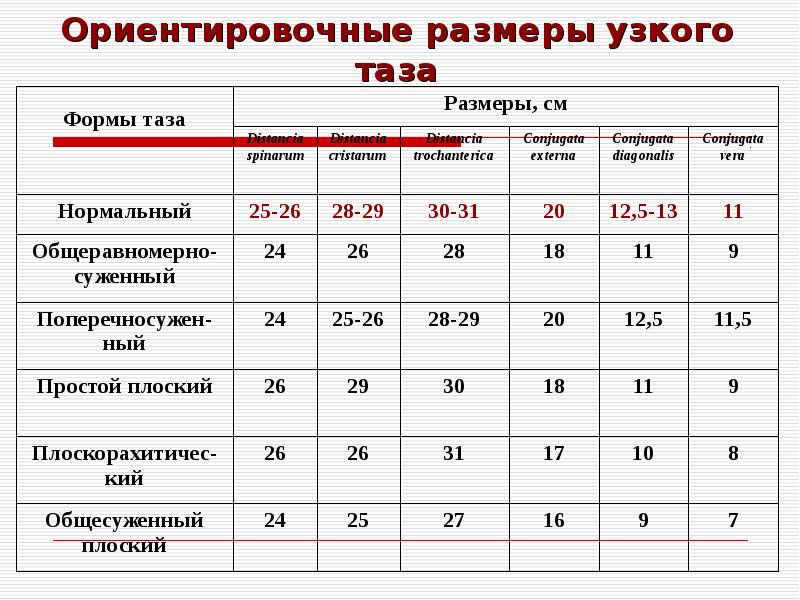 Левиннек и др. предложил 10° края в наклоне и антеверсию положения чашки в THA как безопасную зону (2). Ван и др. продемонстрировали, что семьдесят пять процентов ошибок по всем измерениям находятся в пределах 5° от измерений рентгенограммы (19). Калтейс и др. показали, что точность наклона и антеверсии вертлужной впадины составляла 3° и 10° при обычной рентгенографии, в то время как при КТ она составляла приблизительно 2° (22). Кроме того, стандартные отклонения для набора изображений и участника, которые были связаны с изменчивостью в зависимости от набора изображений и участника, также были очень малы (менее 1,4° и 1,1°). Как и при измерении в трех анатомических точках, ICC для четырех углов превышала 0,9.. Эти результаты также показывают, что измерение направления APP с использованием четырех точек в датчике IMU можно считать надежным с точки зрения внутриучастника и между участниками.
Левиннек и др. предложил 10° края в наклоне и антеверсию положения чашки в THA как безопасную зону (2). Ван и др. продемонстрировали, что семьдесят пять процентов ошибок по всем измерениям находятся в пределах 5° от измерений рентгенограммы (19). Калтейс и др. показали, что точность наклона и антеверсии вертлужной впадины составляла 3° и 10° при обычной рентгенографии, в то время как при КТ она составляла приблизительно 2° (22). Кроме того, стандартные отклонения для набора изображений и участника, которые были связаны с изменчивостью в зависимости от набора изображений и участника, также были очень малы (менее 1,4° и 1,1°). Как и при измерении в трех анатомических точках, ICC для четырех углов превышала 0,9.. Эти результаты также показывают, что измерение направления APP с использованием четырех точек в датчике IMU можно считать надежным с точки зрения внутриучастника и между участниками.
Техника, представленная в этом исследовании, регистрация положения датчика IMU и направления APP, определяемого по трем анатомическим точкам и четырем точкам IMU путем получения рентгеновских изображений во фронтальном и сагиттальном направлениях, может применяться для измерения направления APP. во время динамического движения, когда положение IMU получается из данных датчика IMU вместо информации о четырехточечном местоположении. В будущих исследованиях регистрация положения IMU по четырем точкам и данных о положении IMU от трех внутренних датчиков (акселерометров, гироскопов и магнитометра) может быть полностью получена путем вычисления ортонормированной матрицы из локальной системы координат в положении датчика IMU. к тому, что в данных датчика IMU. Затем направление APP может быть предсказано по данным датчика IMU.
во время динамического движения, когда положение IMU получается из данных датчика IMU вместо информации о четырехточечном местоположении. В будущих исследованиях регистрация положения IMU по четырем точкам и данных о положении IMU от трех внутренних датчиков (акселерометров, гироскопов и магнитометра) может быть полностью получена путем вычисления ортонормированной матрицы из локальной системы координат в положении датчика IMU. к тому, что в данных датчика IMU. Затем направление APP может быть предсказано по данным датчика IMU.
В этом исследовании были ограничения. Для повышения клинической значимости следует учитывать различные анатомические и биомеханические факторы, которые могут вызвать дополнительные ошибки, такие как натяжение мягких тканей, контрактуры и движения кожи, а также индекс массы тела и деформация таза. Кроме того, большее количество участников может улучшить статистическую достоверность, поскольку размер выборки исследования (10 участников) был относительно небольшим.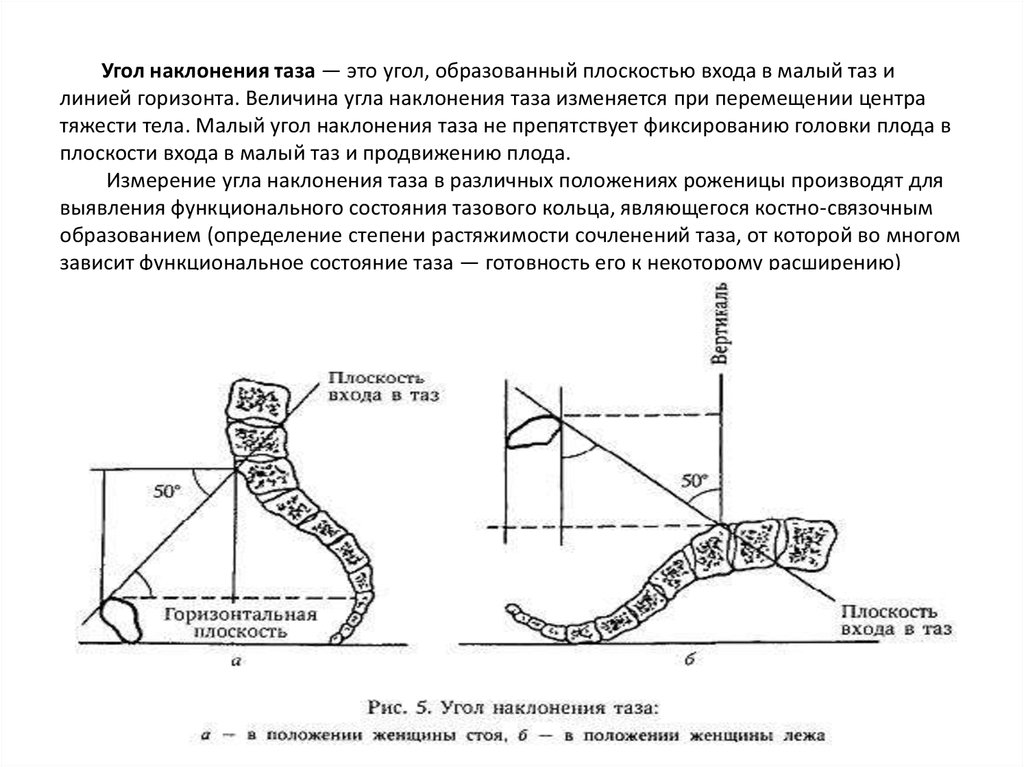
Заключение
В этом исследовании был представлен метод измерения ориентации 3D APP путем регистрации в IMU, и была проверена его надежность. Ошибки измерения в ориентации APP анализировались путем сравнения значений, полученных из четырех точек, измеренных вручную в датчике IMU, и известных точных значений в различных положениях. Кроме того, также сравнивались ошибки между значениями, полученными из трех измеренных вручную трех анатомических точек, и известными точными значениями. Средние ошибки были довольно малы при измерении из трех анатомических точек и были приемлемыми при измерении из четырех точек в датчике IMU. ИКК среди участников превышали 0,9.в обоих измерениях. Эти результаты показывают, что измерение направления APP с использованием четырех точек в датчике IMU можно считать надежным с точки зрения внутриучастника и между участниками. Существующий метод регистрации положения датчика IMU и направления APP путем получения рентгеновских изображений во фронтальном и сагиттальном направлениях может быть основной информацией для измерения направления APP во время динамического движения, когда положение IMU получается из данных датчика IMU, а не четырехточечная информация о местоположении.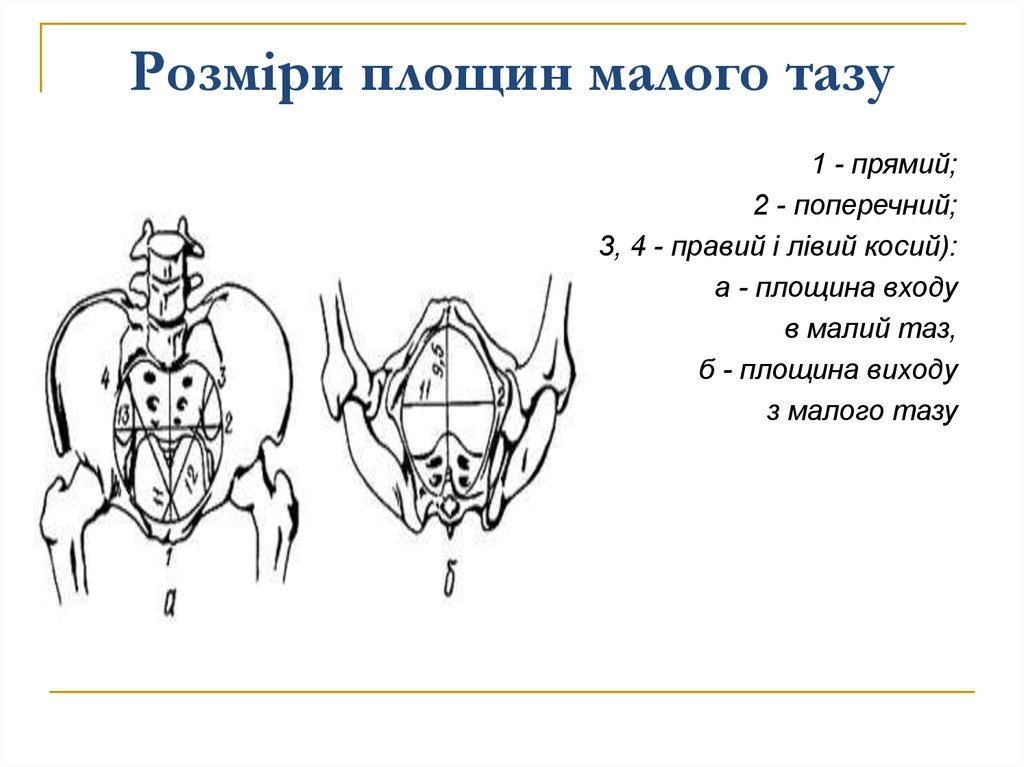
Заявление о доступности данных
Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без неоправданных оговорок.
Вклад авторов
К.К. и Ю.К. внесли свой вклад в разработку концепции и дизайна, а Р.В. внесли свой вклад в сбор данных. KK, RW и YK выполнили анализ и интерпретацию данных. Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Эта работа была поддержана грантами Национального исследовательского фонда Кореи (NRF), финансируемыми правительством Кореи (MSIP) (NRF-2017R1A2B1010492 и NRF-2021R1A2C1011825).
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все утверждения, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций, издателя, редакторов и рецензентов.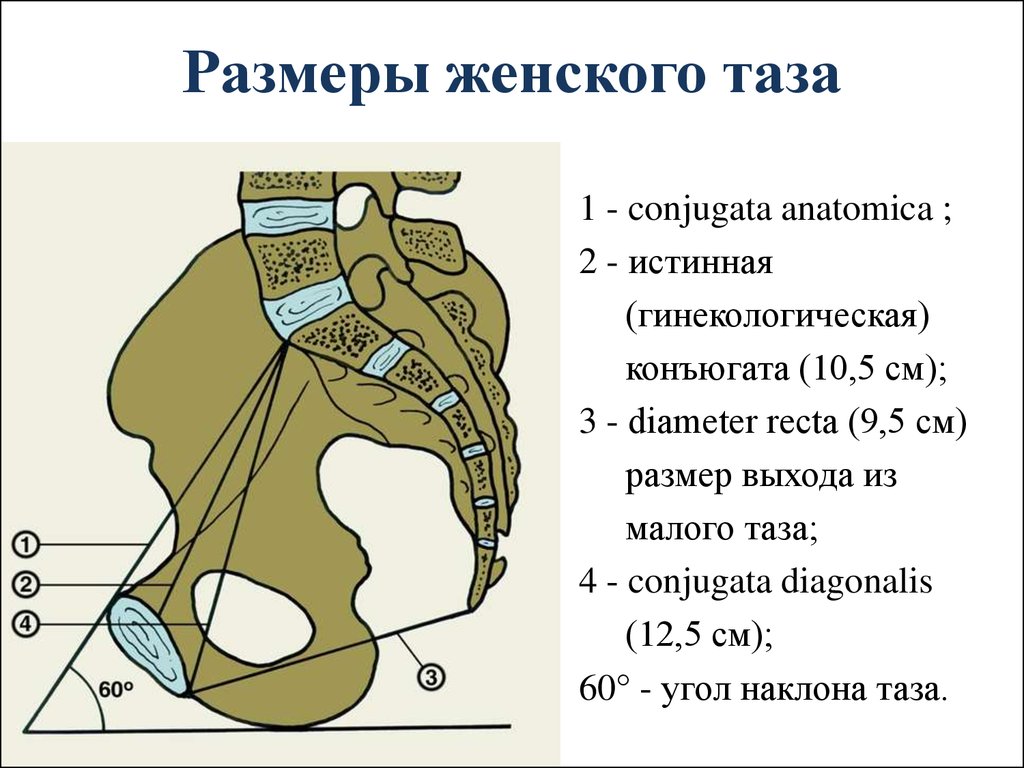 Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Ссылки
1. Ferguson RJ, Palmer AJ, Taylor A, Porter ML, Malchau H, Glyn-Jones S. Замена тазобедренного сустава. Ланцет . (2018) 392 (10158): 1662–71. doi: 10.1016/S0140-6736(18)31777-X
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
2. Левиннек Г.Э., Льюис Дж.Л., Тарр Р., Компере К.Л., Циммерман Дж.Р. Вывихи после тотального эндопротезирования тазобедренного сустава. J Bone Joint Surg Am . (1978) 60 (2): 217–20. дои: 10.2106/00004623-197860020-00014
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
3. Блондель Б., Парратт С., Тропиано П., Поли В., Обаниак Дж. М., Аргенсон Дж. Н. Измерение наклона таза до и после тотального эндопротезирования тазобедренного сустава. Orthop Traumatol Surg Res . (2009) 95(8):568–72. doi: 10.1016/j.otsr.2009.08.004
doi: 10.1016/j.otsr.2009.08.004
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
4. Руссули П., Пинейро-Франко Дж.Л. Биомеханический анализ позвоночно-тазовой организации и адаптации при патологии. Евро Позвоночник J . (2011) 20 (Дополнение 5): 609–18. doi: 10.1007/s00586-011-1928-x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
5. Yang G, Li Y, Zhang H. Влияние наклона таза на угол антеверсии протеза вертлужной впадины. Ортоп Хирург . (2019) 11(5):762–9. doi: 10.1111/os.12543
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
6. DiGioia AM, Hafez MA, Jaramaz B, Levison TJ, Moody JE. Функциональная ориентация таза измеряется по рентгенограммам в положении стоя и сидя. Clin Orthop Relat Res . (2006) 453: 272–6. doi: 10.1097/01.blo.0000238862.92356.45
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
7. Нишихара С., Сугано Н. , Нисии Т., Озоно К., Йошикава Х. Измерение угла сгибания таза с помощью трехмерной компьютерной томографии. Clin Orthop Relat Res . (2003) 411:140–51. doi: 10.1097/01.blo.0000069891.31220.fd
, Нисии Т., Озоно К., Йошикава Х. Измерение угла сгибания таза с помощью трехмерной компьютерной томографии. Clin Orthop Relat Res . (2003) 411:140–51. doi: 10.1097/01.blo.0000069891.31220.fd
CrossRef Full Text | Google Scholar
8. Ли Ю.С., Юн Т.Р. Ошибка в выравнивании вертлужной впадины из-за утолщения мягких тканей передней части таза. J Артропластика . (2008) 23(5):699–706. doi: 10.1016/j.arth.2007.06.012
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
9. Babisch JW, Layher F, Amiot LP. Обоснование использования вертлужной чашки с регулируемым наклоном. J Bone Joint Surg Am . (2008) 90(2):357–65. doi: 10.2106/JBJS.F.00628
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
10. Fritz B, Agten CA, Boldt FK, Zingg PO, Pfirrmann CWA, Sutter R. Покрытие вертлужной впадины различается в положении стоя и лежа: модельная оценка низкодозовых двухплоскостных рентгенограмм и сравнение с КТ. Евро Радиол . (2019) 29(10):5691–9. doi: 10.1007/s00330-019-06136-5
Евро Радиол . (2019) 29(10):5691–9. doi: 10.1007/s00330-019-06136-5
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
11. Lazennec JY, Rousseau MA, Rangel A, Gorin M, Belicourt C, Brusson A, et al. Ориентация компонентов вертлужной впадины при тотальном эндопротезировании таза и тазобедренного сустава в положении сидя и стоя: воспроизводимость измерений с помощью системы визуализации EOS по сравнению с обычными рентгенограммами. Orthop Traumatol Surg Res . (2011) 97(4):373–80. doi: 10.1016/ж.оцр.2011.02.006
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
12. Thelen T, Thelen P, Demezon H, Aunoble S, Le Huec J-C. Нормативные трехмерные измерения ориентации вертлужной впадины с помощью низкодозовой системы визуализации EOS у 102 бессимптомных субъектов в положении стоя: анализ по бокам, полу, тазовому углу и воспроизводимости. Orthop Traumatol Surg Res . (2017) 103 (2): 209–15. doi: 10.1016/j.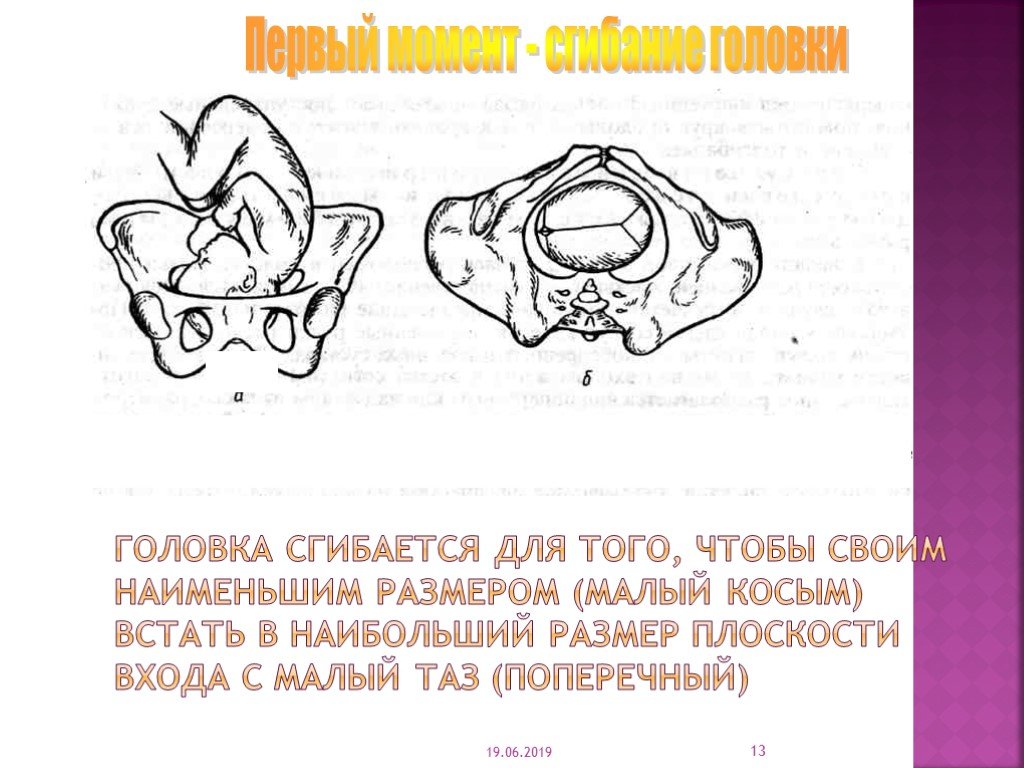 otsr.2016.11.010
otsr.2016.11.010
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
13. Beangea KHE, Chan ADC, Beaudette SM, Graham RB. Параллельная валидность носимого ИМУ для объективной оценки качества функциональных движений и контроля поясничного отдела позвоночника. Дж Биомех . (2019) 97(3):109356. doi: 10.1016/j.jbiomech.2019.109356
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
14. Вонг В.Ю., Вонг М.С. Мониторинг положения туловища с помощью инерциальных датчиков. Евро позвоночник J . (2008) 17(5):743–53. doi: 10.1007/s00586-008-0586-0
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
15. Войнеа Г-Д, Бутнариу С, Моган Г. Измерение и геометрическое моделирование положения позвоночника человека в целях медицинской реабилитации с использованием носимой системы мониторинга на основе инерциальных датчиков. Датчики . (2016) 17(1):3. doi: 10.3390/s17010003
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
16. Stollenwerk K, Müller J, Hinkenjann A, Krüger B. Анализ изменений формы позвоночника во время тренировки осанки с использованием носимого устройства. Датчики . (2019) 19(16):3625. doi: 10.3390/s19163625
Stollenwerk K, Müller J, Hinkenjann A, Krüger B. Анализ изменений формы позвоночника во время тренировки осанки с использованием носимого устройства. Датчики . (2019) 19(16):3625. doi: 10.3390/s19163625
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
17. Хуягбаатар Б., Пуревсурен Т., Ким Ю.Х. Кинематические детерминанты показателей работоспособности во время свинга в гольфе. Proc Inst Mech Eng H . (2019) 233 (5): 554–61. doi: 10.1177/0954411919838643
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
18. Вада Т., Нагахара Р., Гледхилл С., Исидзука Т., Онума Х., Оги Ю. Измерение углов ориентации таза во время спринта с использованием одного инерциального датчика. Proc AMIA Annu Fall Symp . (2020) 49:10. doi: 10.3390/proceedings2020049010
CrossRef Full Text | Google Scholar
19. Wang X, Qureshi A, Vepa A, Rahman U, Palit A, Williams MA, et al. Сенсорный скрининговый инструмент для выявления высокой подвижности таза у пациентов, перенесших тотальное эндопротезирование тазобедренного сустава. Датчики . (2020) 20(21):6182. doi: 10.3390/s20216182
Датчики . (2020) 20(21):6182. doi: 10.3390/s20216182
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
20. Стюарт Дж., Клегг Д., Уотсон С. Исчисление . 9-е изд. Бостон: Cengage Learning (2020).
21. Хурелбаатар Т., Ким К., Ким Ю.Х. Шейно-грудно-поясничная многотельная динамическая модель для оценки нагрузок на суставы и мышечных сил. J Биомех Инж . (2015) 137(11):111001. doi: 10.1115/1.4031351
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
22. Kalteis TA, Handel M, Herbst B, Grifka J, Renkawitz T. In vitro исследование влияния наклона таза на выравнивание вертлужной впадины. J Артропластика . (2009) 24(1):152–7. doi: 10.1016/j.arth.2007.12.014
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Тело в космосе — анатомические размеры, плоскости и поза в танце и жизни
«Чтобы понять концепции баланса и противовеса через позу и размещение, полезно определить (1) каждую из трех плоскостей тела.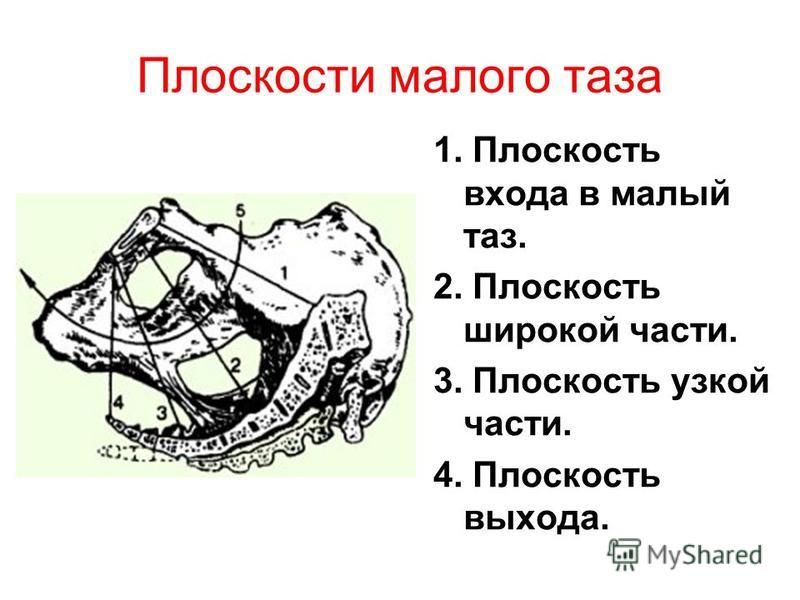 , которые связывают два из трех измерений высоты, ширины и глубины, (2) центр тяжести, (3) центральную вертикальную ось и (4) основание опоры».
, которые связывают два из трех измерений высоты, ширины и глубины, (2) центр тяжести, (3) центральную вертикальную ось и (4) основание опоры».
– Рори Фостер, Балетная педагогика: искусство преподавания **
На прошлой неделе я говорил о динамических действиях, которые делают возможным создание форм с помощью тела, а теперь мы сосредоточимся на пересечении элементов тело и пространство, начиная с того, как мы описываем сами формы в анатомических измерениях и пространственных плоскостях, чтобы в конечном итоге их можно было использовать в выражениях и воспроизводить в хореографии, а также описывать и понимать зрителям. Конечно, для этого мы можем использовать язык, относящийся к конкретной дисциплине, но для меня ценно работать концептуально, поскольку это помогает нам эффективно работать в разных дисциплинах на протяжении всей нашей жизни.
Изучение пространственного языка тела, измерений и планов открывает двери для понимания функциональной анатомии, кинезиологии, медицины, биологии, поведенческой психологии, танцев, йоги и спортивных техник динамического выравнивания и движения, анализа движений и хореографии.
Пегги Хакни дает хороший краткий обзор определения измерений и плоскостей пространства Лаванским анализом движения в своей книге, Установление связей** :
«Наш мир имеет три основных измерения . Каждое измерение содержит два направления, которые являются противоположными полюсами: Вертикальное–Вверх/Вниз; Сагиттальный – вперед/назад; Горизонтально – влево/вправо или сбоку открыто/закрыто сбоку. Каждое направление есть одно пространственное притяжение … Движение в трех основных плоскостях есть движение, которое вкладывает в два пространственных притяжения одновременно ; например вверх и влево в вертикальной плоскости. Каждая плоскость подобна плоскому циклу или прямоугольнику. Вертикальная плоскость – объединяет Вверх/Вниз и Вправо/Влево; Сагиттальная плоскость – сочетает Вперед/Назад и Вверх/Вниз; Горизонтальная плоскость — сочетает в себе право/лево и вперед/назад».
Книжка-раскраска по анатомии** , обычно используемая для изучения анатомии во всех дисциплинах, включая мою кинезиологию для танцоров в аспирантуре, далее описывает плоскости следующим образом: голову и туловище на правую и левую половины. Для этой плоскости характерно наличие срединной линии сечения позвоночного столба и спинного мозга. Срединной плоскостью является срединная сагиттальная (среднесагиттальная) плоскость.
Сагиттальная плоскость представляет собой продольную плоскость, разделяющую голову и туловище на левую и правую части (не пополам). Он параллелен срединной (не медиальной) плоскости».
По поводу сагиттальной плоскости Рори Фостер в книге «Педагогика балета » добавляет: «Сагиттальная плоскость — это вертикальная линия, которая симметрично делит тело на правую и левую половины. Если смотреть спереди, когда ступни находятся в первом положении, эта линия проходит от макушки головы через центр тела и заканчивается между пятками — опорой для равномерно распределенного гравитационного веса тела. Пространственными измерениями в движении являются высота и глубина, как в наклоне вперед или назад, или сальто вперед или назад».
Пространственными измерениями в движении являются высота и глубина, как в наклоне вперед или назад, или сальто вперед или назад».
Вот почему мы также называем сагиттальную плоскость плоскостью «колеса». Если мы движемся или катимся вперед или назад, как колесо, мы движемся через сагиттальную плоскость.
Вернемся к Анатомической раскраске , в ней описана коронарная плоскость: « коронарная или фронтальная плоскость представляет собой продольную плоскость, разделяющую тело (голову, туловище, конечности) или его части на переднюю и заднюю половины или части». – Книжка-раскраска по анатомии
Балетная педагогика добавляет: « венечная (вертикальная) плоскость — вертикальная линия, которая делит тело на переднюю и заднюю части. При взгляде на эту линию из положения в профиль с параллельными стопами она проходит от макушки головы прямо перед ухом, продолжаясь через таз, тазобедренный сустав, колено и в плюсневую или поперечную дугу впереди лодыжка. Пространственными измерениями в движении являются высота и ширина, как в растяжке или камбре в сторону или в колесе».
Пространственными измерениями в движении являются высота и ширина, как в растяжке или камбре в сторону или в колесе».
Коронарная/фронтальная/вертикальная плоскость также называется плоскостью «двери», так как человек находится в этой плоскости, стоя в дверном проеме, жестикулируя или двигаясь в сторону.
«Коронарная и сагиттальная плоскости вместе образуют центральную вертикальную ось, также называемую линией гравитации или линией отвеса». – снова Балет Педагогика
В Анатомической раскраске описана поперечная или горизонтальная плоскость: «Поперечная плоскость делит тело на верхнюю и нижнюю половины или части (поперечные срезы). Он перпендикулярен продольным плоскостям. Поперечные плоскости могут быть горизонтальными плоскостями вертикального тела. Поперечные плоскости рентгенологи называют «аксиальными» или «трансаксиальными» срезами».
Балетная педагогика добавляет: «Горизонтальная (поперечная) плоскость делит тело на верхнюю и нижнюю половины.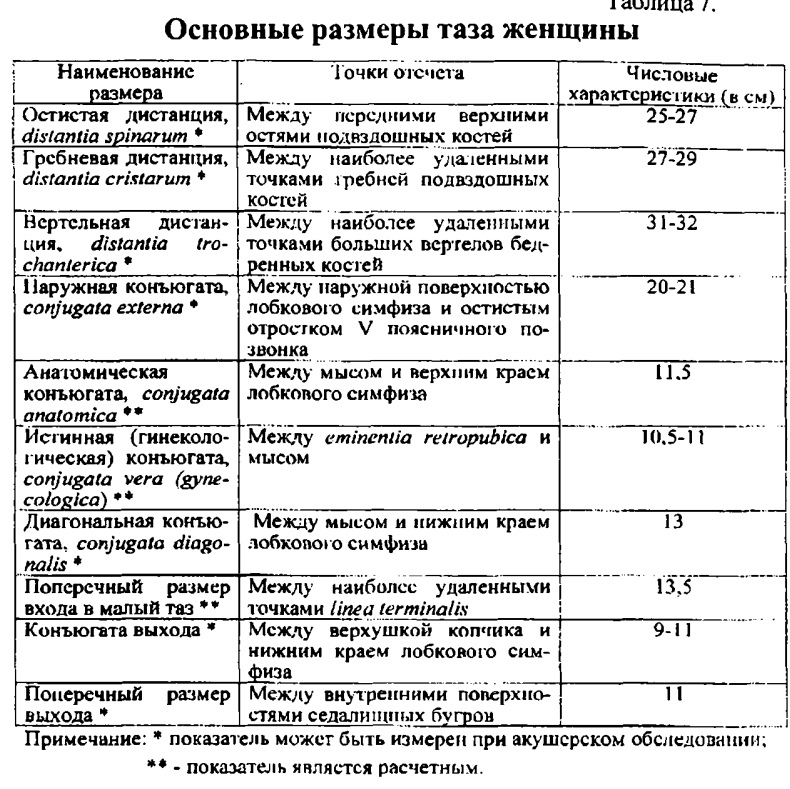 Пространственными измерениями в движении являются ширина и глубина (вращение), как в пируэте или фуэте повороте».
Пространственными измерениями в движении являются ширина и глубина (вращение), как в пируэте или фуэте повороте».
Поперечная/горизонтальная плоскость также известна как плоскость «стола», поскольку, когда мы двигаемся или жестикулируем в этой плоскости, мы как бы перемещаемся по поверхности стола.
«Точка, в которой все три плоскости (коронарная, сагиттальная и горизонтальная) пересекаются, называется центр тяжести (COG ) — воображаемая точка, в которой все части тела уравновешивают друг друга. Он расположен чуть ниже пупка по средней линии тела и впереди второго крестцового позвонка». – еще раз Балетная педагогика
Балетная педагогика помогает объединить все эти концепции, чтобы применить их к нашей позе в практике балетного танца: «Правильная балетная поза и положение также требуют удлинения ног и туловища посредством удлинения и растяжения. Это общеизвестно и часто неправильно понимается как подтягивание.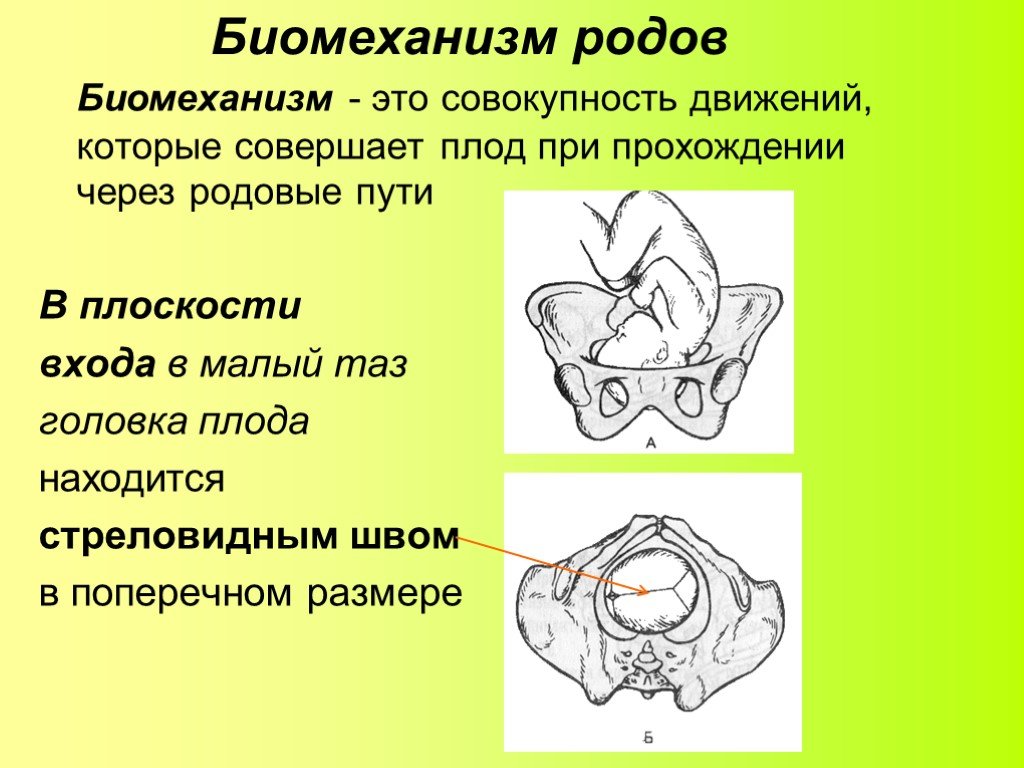 Удлинение корпуса поднимает центр тяжести. Поднимая его, мы увеличиваем расстояние от нашего центра тяжести и нашей базы опоры на одной или обеих ногах. Это делается путем удлинения и растяжения позвоночника, тем самым удлиняя естественные изгибы позвоночника. Это вызывает снижение стабильности, но обеспечивает большую подвижность, позволяя танцору двигаться быстро, легко и грациозно. Снижение фактора стабильности преодолевается годами мышечного развития и контроля при оттачивании техники… Должно быть ощущение толчка вниз через ноги от тазобедренных суставов при одновременном удлинении и подтягивании от линии талии . Удлинение вверх или туловище от талии должно ощущаться прежде всего в позвоночнике – голова, шея, плечи и руки должны оставаться свободными от какого-либо напряжения. Поддержание этой позы требует силы брюшного пресса, а также контроля в верхней части спины и между лопатками».
Удлинение корпуса поднимает центр тяжести. Поднимая его, мы увеличиваем расстояние от нашего центра тяжести и нашей базы опоры на одной или обеих ногах. Это делается путем удлинения и растяжения позвоночника, тем самым удлиняя естественные изгибы позвоночника. Это вызывает снижение стабильности, но обеспечивает большую подвижность, позволяя танцору двигаться быстро, легко и грациозно. Снижение фактора стабильности преодолевается годами мышечного развития и контроля при оттачивании техники… Должно быть ощущение толчка вниз через ноги от тазобедренных суставов при одновременном удлинении и подтягивании от линии талии . Удлинение вверх или туловище от талии должно ощущаться прежде всего в позвоночнике – голова, шея, плечи и руки должны оставаться свободными от какого-либо напряжения. Поддержание этой позы требует силы брюшного пресса, а также контроля в верхней части спины и между лопатками».
Если вы умеете слушать на слух или любите подкасты, вам также может понравиться этот контент в моем подкасте.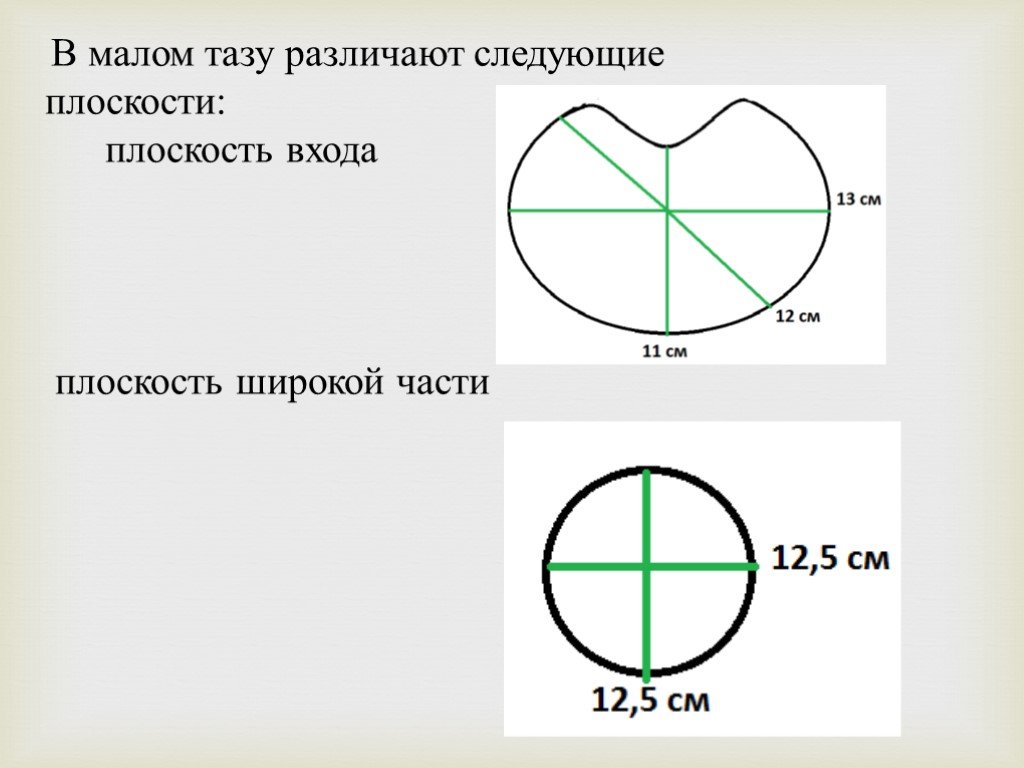 The Body in Space » — это второй в моей серии подкастов об элементах танца, где я буду объяснять каждый элемент, включая тело, действие, форму/формирование/пространство, время и качество/энергию, а также то, как я используйте их в хореографии, критике, преподавании и рефлексивной практике. Кроме того, это мой 25-й подкаст, и я не могу поверить, что уже выпустил так много! Это был интересный способ собрать и поделиться темами из моих танцевальных, йогических, преподавательских и коучинговых практик. Если вы хотите больше узнать о концепции космоса в подкасте, посмотрите 003: Обретение ориентированного состояния бытия и 013: Электрический поток в танце, йоге и жизни .
The Body in Space » — это второй в моей серии подкастов об элементах танца, где я буду объяснять каждый элемент, включая тело, действие, форму/формирование/пространство, время и качество/энергию, а также то, как я используйте их в хореографии, критике, преподавании и рефлексивной практике. Кроме того, это мой 25-й подкаст, и я не могу поверить, что уже выпустил так много! Это был интересный способ собрать и поделиться темами из моих танцевальных, йогических, преподавательских и коучинговых практик. Если вы хотите больше узнать о концепции космоса в подкасте, посмотрите 003: Обретение ориентированного состояния бытия и 013: Электрический поток в танце, йоге и жизни .
На прошлой неделе мы обсуждали силу брюшного пресса, необходимую для поддержания такого выравнивания, а на этой неделе я создал пару видеороликов на YouTube-канале A Blythe Coach, которые учат и укрепляют анатомические размеры и плоскости. Далее я свяжу эти представления о теле в пространстве с более широким пространством, в котором выступает танцор и в котором движется артист или человек.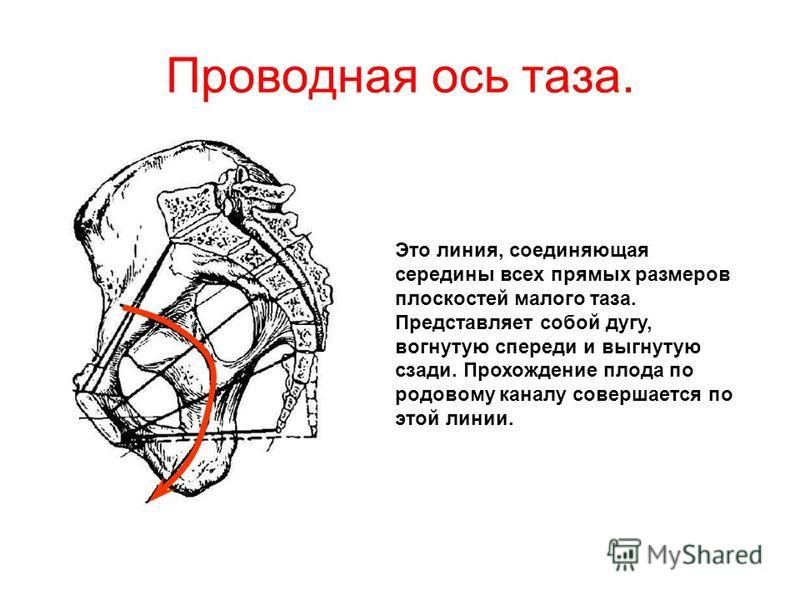
На этой неделе я предлагаю балет «Ebullient Battement & Passe», в котором я учу движениям battements dégage, grand battements, coupé и passé, а также формам сюр -ле-ку-де-пье и уйти на пенсию. Я также укрепляю концепции анатомической плоскости, обсуждавшиеся на этой неделе.
В сфере йоги в Бхагавадгите** идеальная поза для медитативной практики описана так: «Держите тело, голову и шею прямо, не глядя по сторонам; вместо этого смотрите на кончик своего носа». Как обсуждалось в моем подкасте «Электрический поток в танце, йоге и жизни», это позволяет энергии или пране «легко течь через позвоночник вдоль … важные нади проходящие через все чакры ».
Анатомия хатха-йоги** демонстрирует, насколько важно правильное выравнивание для нашей практики в экспериментальной практике:
«Никакая дыхательная техника не будет работать, если вы не сидите правильно, как покажут два простых эксперимента. Сначала сядьте совершенно прямо и дышите ровно, помня об эллиптической природе дыхательного цикла и следя за тем, чтобы вы не создавали пауз или рывков на обоих концах эллипса. Теперь слегка наклонитесь вперед и позвольте поясничному лордозу сжаться. Обратите внимание на три вещи: вдох более затруднен, выдох начинается со вдоха и невозможно плавно использовать мышцы живота, чтобы помочь выдоху. Дышать ровно невозможно и медитация невозможна. Урок очевиден: не падайте духом.
Сначала сядьте совершенно прямо и дышите ровно, помня об эллиптической природе дыхательного цикла и следя за тем, чтобы вы не создавали пауз или рывков на обоих концах эллипса. Теперь слегка наклонитесь вперед и позвольте поясничному лордозу сжаться. Обратите внимание на три вещи: вдох более затруднен, выдох начинается со вдоха и невозможно плавно использовать мышцы живота, чтобы помочь выдоху. Дышать ровно невозможно и медитация невозможна. Урок очевиден: не падайте духом.
Теперь сядьте на край стула. Держите поясничный лордоз максимально выгнутым, но наклоняйтесь вперед, образуя острый угол между туловищем и бедрами. Следите за своим дыханием. Мышцы живота теперь должны сильно давить на напряженный живот, чтобы помочь выдоху. Затем, в начале вдоха, если вы расслабите дыхание, воздух устремится в дыхательные пути. Попробуйте сдерживать вдох и обратите внимание, что для предотвращения внезапного притока воздуха требуются активные мышцы живота. Урок здесь? Не наклоняйтесь вперед, даже с прямой спиной».
Как я упоминал на прошлой неделе, тема установления физической целостности и мировоззрения также связана с целостностью наших действий. Как онтологический коуч, благодаря коучингу достижений я узнал, что «Решение проблем с чувством целостности — это ежедневная практика. Мы начинаем иметь низкую терпимость к тому, чтобы быть вне целостности. Мы практикуем и лучше осознаем свою честность. Делать выбор на основе контекста, который делает нас жертвой, становится неприемлемым. Наша жизнь обретает новую силу, когда мы пытаемся восстановить свою целостность».
В будущем я затрону смежные темы о кристаллической структуре сценического пространства в балете и танце, о том, как разные школы классического балета по-разному классифицируют стены и углы сцены, о том, как анализ движения Лабана выявляет родство между перемещением в пространстве с качествами и настроениями, все это как хореографическое вдохновение и многое другое!
Моя танцевальная постановка и компания на этой неделе — Pilobolus, особенно их постановки «Атлант расправил плечи» и «Страна теней», которые являются прекрасными примерами использования измерений, плоскостей и других пространственных концепций в танце, а также совместного процесса и инновационная партнерская работа.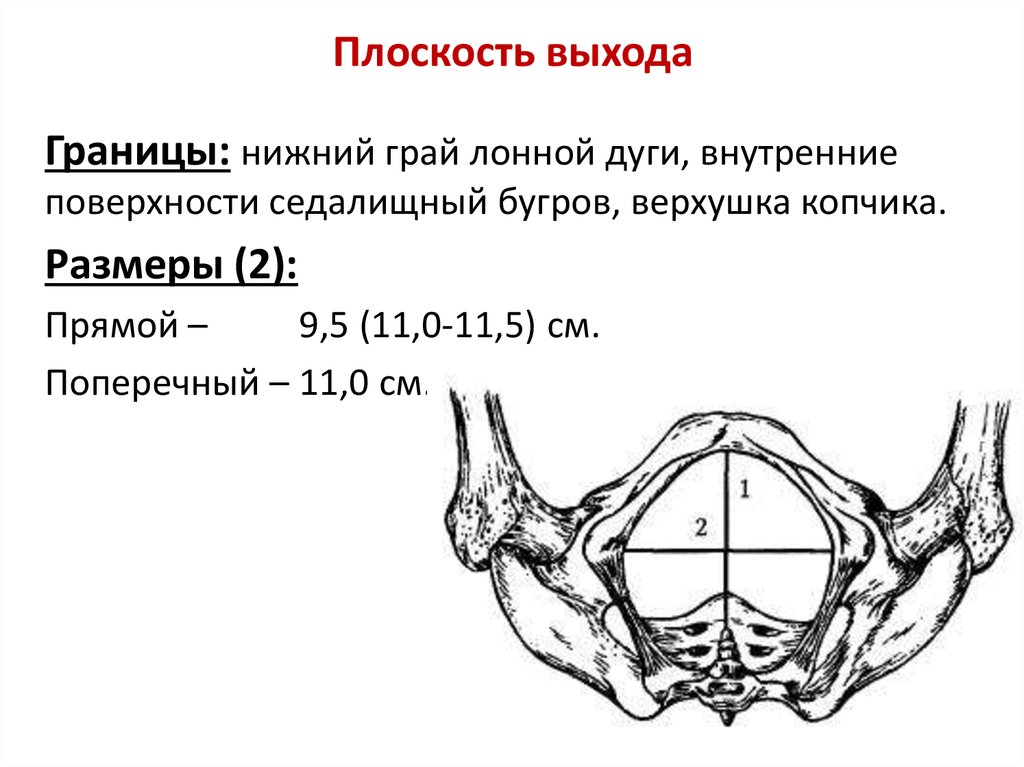 Что касается Пилоболуса, то во время учебы на магистра иностранных дел в Гавайском университете я имел большое удовольствие участвовать в мастер-классе от бывшего члена компании Мэтта дель Росарио, выпускника Школы искусств Северной Каролины, который также вырос на Гавайях. Иногда это тесен мир!
Что касается Пилоболуса, то во время учебы на магистра иностранных дел в Гавайском университете я имел большое удовольствие участвовать в мастер-классе от бывшего члена компании Мэтта дель Росарио, выпускника Школы искусств Северной Каролины, который также вырос на Гавайях. Иногда это тесен мир!
Я никогда не хотел, чтобы мои плейлисты стали еженедельной вещью, так как обычно я придумываю новые для своих занятий только сезонно, а иногда и для себя, но я полагаю, что в последнее время я был особенно плодовит, и на этой неделе Я делюсь своим « Send Me — Bluesy Autumn Jazz » Playlist .
В ознаменование этого времени года сбора урожая, благодарности и празднования, в ноябре я предлагаю один из моих любимых инструментов коучинга одному человеку еженедельно. это Суть разговора , и это примерно 90-минутный разговор о том, как вы проявляетесь в жизни. Как бы вы хотели выглядеть в этот праздничный сезон? Наслаждайтесь этой бесплатной коуч-сессией со мной, назначив встречу в моем календаре Calendly в ноябре. Это трансформирующий разговор сам по себе, и вы сделаете действенные шаги, чтобы показать себя с лучшей стороны на праздниках, в 2021 году и далее!
Это трансформирующий разговор сам по себе, и вы сделаете действенные шаги, чтобы показать себя с лучшей стороны на праздниках, в 2021 году и далее!
Немного интересных личных новостей, в этом месяце я завершаю 200-часовой курс подготовки учителей йоги (наконец-то — изначально он должен был завершиться летом, но из-за пандемии все пришлось значительно сдвинуть — рад мы вообще можем его завершить! Я так многому научилась и с нетерпением жду возможности поделиться чем-то еще в будущем. Но из-за деятельности, связанной с этой важной вехой, я публикую этот блог немного позже, чем обычно, и не буду публиковать новый до следующей недели.
До тех пор, счастливого Хэллоуина!, и я приглашаю вас осознать свою позу, поскольку она связана с этими пространственными идеями, и практиковать физическую интеграцию для вашего танца и вашей жизни.
Блайт Стивенс
Она/она или они/они
Тренер Блайт:
Танцевальное образование и коучинг, чтобы двигаться по жизни с балансом, грацией и силой
** Я включил ссылки, чтобы порекомендовать некоторые из моих самых любимых книг и как читатель, ученик на протяжении всей жизни и академик, я надеюсь, вам понравятся мои рекомендации.